 صفحه اصلی
صفحه اصلی
حفاظت دیستانس، چالشها و ملاحظات - بخش 3
دستهبندی: حفاظت

در مقالات اول و دوم از مجموعه مقالات «حفاظت دیستانس، چالشها و ملاحظات» اقدام به تشریح بخشی از منابع خطا در حفاظت دیستانس شد. در این مقاله ضمن معرفی مراجع خطا و چالشهای حفاظتی تکمیلی اقدام به جمعبندی بحث عوامل اثرگذار بر روی دقت رله دیستانس میشود. در ادامه سومین بخش از این مجموعه مقالات خدمتتان تقدیم میگردد.
4 - دقت رله
در زنجیره اجزای اندازهگیری، رله دیستانس آخرین جزء در سلسله ادوات اندازهگیری بوده و دقت آن بر عملکرد کلی سامانه حفاظتی اثرگذار است. به سبب اهمیت بحث بد نیست تا دقت رله در زون 1 مستقل از زونهای دیگر مورد بحث و بررسی قرار گیرد. دقت حالت دائم (steady state) المان دیستانس میبایست در حاشیه اطمینان تنظیمات زونهای برد کوتاه (زون 1) و زونهای برد بلند (نظیر زون 2 و 3) منظور شود. دقت رلههای میکروپروسسوری بسیار بالا بوده و خطای آنها در حد کسری از درصد است. هرچند در خطاهای منجر به ولتاژهایی بسیار کوچک (سیستم های ضعیف)، یا خطاهای منجر به جریانهای بسیار بالا (خطوط کوتاه در سیستم های قوی) و یا تنظیمات بسیار کوچک برای برد رله، نیاز است تا حتما مشخصات فنی رله (دقت رله و ...) در تعیین تنظیمات در نظر گرفته شود.
در زونهای برد بلند عموما تنظیم زمانی رله با یک "تاخیر" خودخواسته همراه شده و این امر سبب میشود که به طور معمول تهدید افزایش برد گذرا صرفا منحصر به زون 1 رلههای دیستانس شود. دقت حالت گذرای رله به صورت «خطای افزایش برد گذرای زون 1» تعریف میشود. این امر به این دلیل است که در بین زونهای رله دیستانس تریپ به صورت مستقیم (بدون تاخیر عمدی و هماهنگی زمانی و یا سیگنال پایلوت) تنها در زون 1 اتفاق افتاده و فلسفه حفاظتی و طراحی آن با سایر زون ها متفاوت است. روش تستی برای تعیین افزایش برد گذرا طرح میشود که در رابطه مندرج در شکل 1 مشخص گردیده است. با اعمال خطاهایی در انتهای خط و یا برد تنظیمی، برد رله به حدی کاهش مییابد که برای هیچ یک از این خطاها عملکرد نداشته باشد. این برد پارامتر mX را مشخص میکند. سپس برد رله به اندازهای افزایش مییابد که به ازای همه این موارد عملکرد داشته باشد، در این حالت برد mY تعیین میگردد. سپس افزایش برد گذرا (TO) از رابطه زیر قابل محاسبه است.
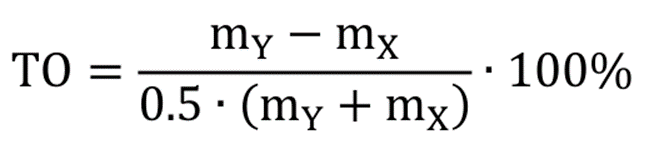
شکل 1 - رابطه محاسبه افزایش برد گذرا
معادله بالا کاری به محل خطا ندارد و صرفا منعکس کننده اختلاف بین مقادیر برد رله دیستانس در دو حالت تریپ و عدم تریپ است. برای مثال در صورتی که TO از رابطه بالا برابر با 5 درصد محاسبه شود. این امر نشان دهنده آن است که برای اجتناب از بروز افزایش برد گذرا برای زون 1، تنظیم این زون به 5 درصد حاشیه اطمینان نیاز دارد.
افزایش برد گذرا زمانی که رله از CCVTها استفاده میکند (به خصوص در سیستمهای ضعیف) به یک عامل جدی نگرانی تبدیل میشود. رلهها غالبا بدترین حالت افزایش برد گذرا را بر حسب SIR اعلام میکنند مثلا افزایش برد 5 درصد برای SIR<30. برخی از سازندگان در مشخصات رله اقدام به انتشار یک منحنی برای مشخص کردن حداکثر برد مجاز زون 1 در ازای SIRهای مختلف مینمایند. در استفاده از این منحنیها میبایست حتما به این نکته توجه شود که آیا این منحنی با فرض استفاده از CCVTها نگاشته شده یا خیر.
جمع آثار منابع خطا
در تعیین تنظیمات زون 1 رله دیستانس یک رویکرد این است که بدترین شرایط ممکن درنظر گرفته شود. در این شرایط همه منابع خطا با هم جمع میشوند، یعنی ترانسفورماتور ولتاژ کوچکتر اندازهگیری کرده، ترانسفورماتور جریان، جریان را بزرگتر میبینند، در مدلسازیها امپدانس خط بیشتر از واقع تخمین زده شده و رله دچار افزایش برد میشود. برای مقادیر تیپیکال لیست شده در جدول 1، این رویکرد سبب پدید آمدن یک حاشیه اطمینان 26 درصدی برای تنظیم رلههای دیستانس فازی و یک حاشیه 31 درصدی برای واحدهای زمین دیستانس میشود (به ترتیب بردی برابر با 74 درصد و 69 درصد از طول خط).
جدول 1 - خطاهای مبنایی زون 1 رله دیستانس
| منبع خطا | خطای تیپیکال پدید آمده در برد رله (%) |
| ترانسفورماتور ولتاژ | 5 |
| ترانسفورماتور جریان | 10 |
| اطلاعات امپدانسی خط |
5 فازی 10 زمین |
| دقت حالت دائم رله | 1 |
| دقت حالت گذرای رله | 5 |
| جمع آثارخطا (بدترین حالت ممکن) |
26 فازی 31 زمین |
در بسیاری از کاربردها استفاده از تنظیمی برابر با 80 درصد طول خط برای حفاظت فازی و 75 درصدی برای رلههای دیستانس زمین استفاده میشود. این حاشیه اطمینانهای تیپیکال 20 تا 25 درصدی به این دلیل میتوانند مورد قبول قرار گیرند که لزوما همه خطاها در بدبینانه ترین شرط به صورت همزمان رخ نداده و بعضا سبب کنسل کردن اثر یکدیگر نیز میشوند. برای مثال حالتی را در نظر بگیرید که هم ترانسفورماتور ولتاژ و هم ترانسفورماتور جریان هر دو در جهت کاهشی خطا داشته باشند. در این صورت میزان خطای نهایی حاصل تفریق میزان خطای هر تجهیز اندازهگیری است.
در صورتی که برای یک رله اطلاعات دقیق و تحلیلهای مورد اطمینان وجود داشته باشد (به خصوص اطلاعات تاریخی خطا) میتوان تنظیمات را با حاشیه اطمینان کوچکتری انتخاب نمود.
5- خطاهای مقاومتی
یک خطای مقاومتی مشابه آنچه در شکل 2 رخ داده را در نظر بگیرید. برای این خطا رابطه مندرج در شکل قابل بیان است. در این رابطه امپدانس ظاهری رله دیستانس (Zapparent) محاسبه شده است. منظور از امپدانس ظاهری، امپدانسیست که رله با استفاده از ولتاژ و جریانهای محل نصب خود محاسبه مینماید.
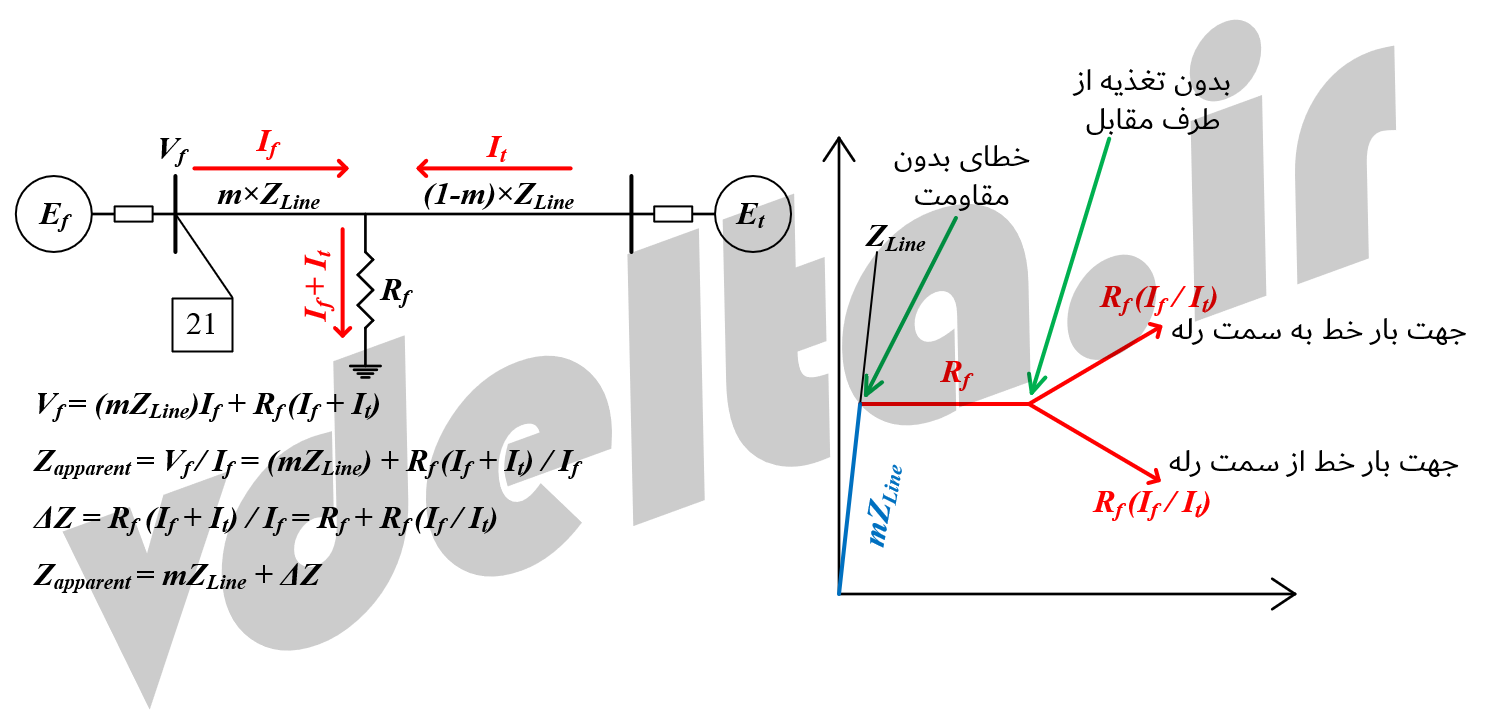
شکل 2 - خطای مقاومتی بر روی یک خط انتقال با تغذیه از طرف مقابل
برای خطای مشخص شده در شکل، امپدانس ظاهری رله از دو بخش تشکیل شده است. بخش اول mZLine بوده که در واقع امپدانس خط بین رله و محل خطا بودده و بخش دوم آن ΔZ است (که به واسطه مقاومت خطا به وجود آمده است). همانطور که دیده میشود این بخش (ΔZ)، تابعی از جریان عبوری از رله (If)، جریان تغذیه سمت مقابل (It) و مقاومت خطا (Rf) است. در شکل 2 امپدانس ظاهری حاصل از خطای مشخص شده در صفحه R-X ترسیم گردیده است. برای خطایی در فاصله mدرصدی از رله، محل خطا برای حالات: خطای بدون مقاومت، خطای با مقاومت و بدون تغذیه از طرف مقابل، و خطای با مقاومت و با تغذیه از طرف مقابل ترسیم گردیده است. اگر خطایی بدون مقاومت رخ میداد (Rf=0) عبارت (ΔZ) هم برابر با صفر میشد و امپدانس ظاهری عملا باربر با mZLine میشد. اگر سمت مقابل جریانی کوچک تزریق کرده و یا اصلا جریانی تزریق نکند در این صورت ΔZ تقریبا برابر با Rf شده و اثر مقاومت خطا را نشان میدهد. هرچند در صورتی که جریان تزریقی از سمت مقابل مقداری غیرقابل صرف نظر کردن داشته باشد، موضوع قدری پیچیدهتر میشود. در این حالت در شرایطی که جهت بار به سمت رله باشد، امپدانس ظاهری به سمت بالا میل کرده و سبب پدید آمدن پدیده کاهش برد میشود. در صورتی که جهت بار قبل از خطا به سمت ترمینال مقابل باشد، امپدانس ظاهری به سمت پایین کج شده و سبب پدید آمدن شرایط افزایش برد میشود. لذا در صورت وقوع خطای مقاومتی در شرایطی که تغذیه از طرف مقابل وجود دارد، همواره امپدانس ظاهری رله دیستانس بسته به پخش بار قبل از خطا به سمت بالا یا پایین منحرف میشود. با توجه به بروز پدیده افزایش برد در حالت ارسال توان از باس رله، اجتناب از تریپ برای خطاهای خط اصلی میبایست در نظر گرفته شود. با در نظر گرفتن این امر که به دلیل خطاهای مندرج در جدول 1 این امکان برای رله وجود دارد که خطاهارا نزدیک تر از آنچه که هستند، رصد کند.
ثبت نظر:
وبسایت Vδ
ویدلتا، مجموعهای از مقالات، آموزشها و مباحث حوزه برق و برنامهنویسی. برای اطلاع از انتشار مقالات حتما در کانال تلگرام ما عضو شوید.
 آدرس کانال تلگرام
آدرس کانال تلگرام
Channel ID: @vdelta_ir
آخرین مطالب
-

سامانه محاسبات سیستم اتصال زمین مجددا در دسترس قرار گرفت!
3 هفته،6 روز قبل -
مهندسین/محققین از فایلهایتان پشتیبان بگیرید!
6 ماه،1 هفته قبل -
یک دوره حضوری پس از دورههای اغلب مجازی
9 ماه قبل -
بررسی اثر پی و میلگردهای مدفون در بتن بر روی سیستم اتصال زمین یک پست
9 ماه،1 هفته قبل -
رفتاری عجیب در امپدانس معادل دو سیستم زمین موازی شده
1 سال قبل
درباره نویسنده

آرش صمدی
دانشجوی دکتری مهندسی برق قدرت و علاقهمند به مباحث حوزه برنامهنویسی کاربردی در صنعت برق. زمینههای تخصصی: حفاظت سیستمهای قدرت، ارتینگ و توسعه نرمافزارهای حوزه مهندسی برق
سایر مقالات درباره نویسنده اینستاگرام (بهزودی)
اینستاگرام (بهزودی)